Contents
% Artificial Point Cloud Test Sets And Results % Kartik V. Sastry, Team NavX % ECE 4012 - Senior Design 2 % Generates simple test cases for path planning. Data is normalized such % that all dimensions are on the range 0 to 1 so that incline angles can be % visualized. % Each test case is visualized, and a text file of tuples [X, Y, Z, CLASS] % is generated for input into the path planner. % The Path Planner is run on each dataset for a success case and a failure % case and results are visualized.
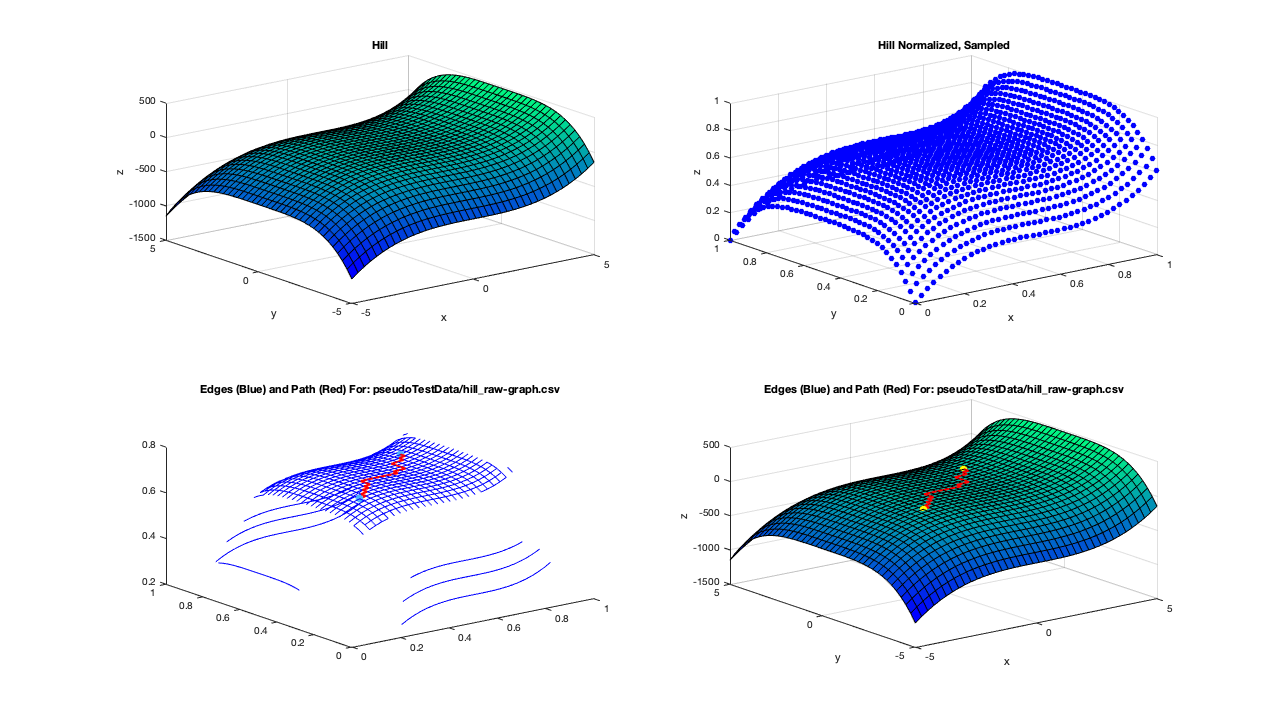
Hill
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-5, 5, myN); myY = linspace(-5, 5, myN); [myXX, myYY] = meshgrid(myX, myY); myZZ = - myXX.^2 + 4.*myXX.^3 - myYY.^4; myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ); colormap winter xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Plot "Sampled Data" myXVec = normalize(myXVec); myYVec = normalize(myYVec); myZVec = normalize(myZVec); subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 'bo', 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Hill Normalized, Sampled') % All classified as ground myClasses = 2.*ones(length(myXVec), 1); % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClasses; csvwrite('hill_raw.csv', myLongRow); % Visualize Edge Connectivity myFilename = 'pseudoTestData/hill_raw-graph.csv'; myEdges = csvread(myFilename); subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ 0.3077 0.359 0.6855; 0.6923 0.641 0.7205]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/hill_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ); colormap winter hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Endpoints and Path Waypoints Need to be Un-Normalized! myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); myEndpoints(:, 1) = (myEndpoints(:, 1) * range(myXVec)) + min(myXVec); myEndpoints(:, 2) = (myEndpoints(:, 2) * range(myYVec)) + min(myYVec); myEndpoints(:, 3) = (myEndpoints(:, 3) * range(myZVec)) + min(myZVec); myPath(:, 1) = (myPath(:, 1) * range(myXVec)) + min(myXVec); myPath(:, 2) = (myPath(:, 2) * range(myYVec)) + min(myYVec); myPath(:, 3) = (myPath(:, 3) * range(myZVec)) + min(myZVec); % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
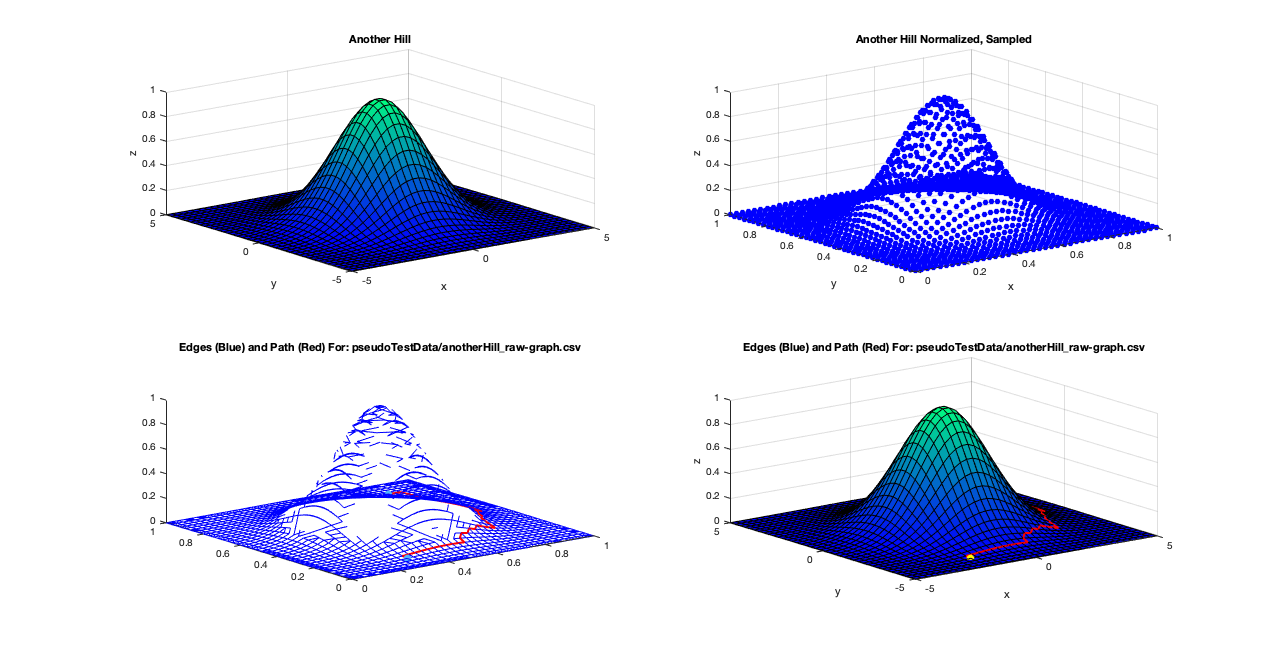
Another Hill
Can pick endpoints on opposite side of the hill
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-5, 5, myN); myY = linspace(-5, 5, myN); [myXX, myYY] = meshgrid(myX, myY); mySigmaX = 1.5; mySigmaY = 1.5; myMeanX = 0; myMeanY = 0; % Bivariate Gaussian myZZ = exp( -( ( (myXX-myMeanX).^2 ./ (2*mySigmaX.^2) ) + ... ( (myYY-myMeanY).^2 ./ (2*mySigmaY.^2) ) ) ); myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ); colormap winter xlabel('x'); ylabel('y'); zlabel('z'); title('Another Hill') % Plot "Sampled Data" myXVec = normalize(myXVec); myYVec = normalize(myYVec); myZVec = normalize(myZVec); subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 'bo', 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Another Hill Normalized, Sampled') % All classified as ground myClasses = 2.*ones(length(myXVec), 1); % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClasses; csvwrite('anotherHill_raw.csv', myLongRow); % Visualize Edge Connectivity myFilename = 'pseudoTestData/anotherHill_raw-graph.csv'; myEdges = csvread(myFilename); subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ 0.3077 0.1026 0.01322; 0.8205 0.8718 0.004746]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/anotherHill_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ); colormap winter hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Endpoints and Path Waypoints Need to be Un-Normalized! myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); myEndpoints(:, 1) = (myEndpoints(:, 1) * range(myXVec)) + min(myXVec); myEndpoints(:, 2) = (myEndpoints(:, 2) * range(myYVec)) + min(myYVec); myEndpoints(:, 3) = (myEndpoints(:, 3) * range(myZVec)) + min(myZVec); myPath(:, 1) = (myPath(:, 1) * range(myXVec)) + min(myXVec); myPath(:, 2) = (myPath(:, 2) * range(myYVec)) + min(myYVec); myPath(:, 3) = (myPath(:, 3) * range(myZVec)) + min(myZVec); % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
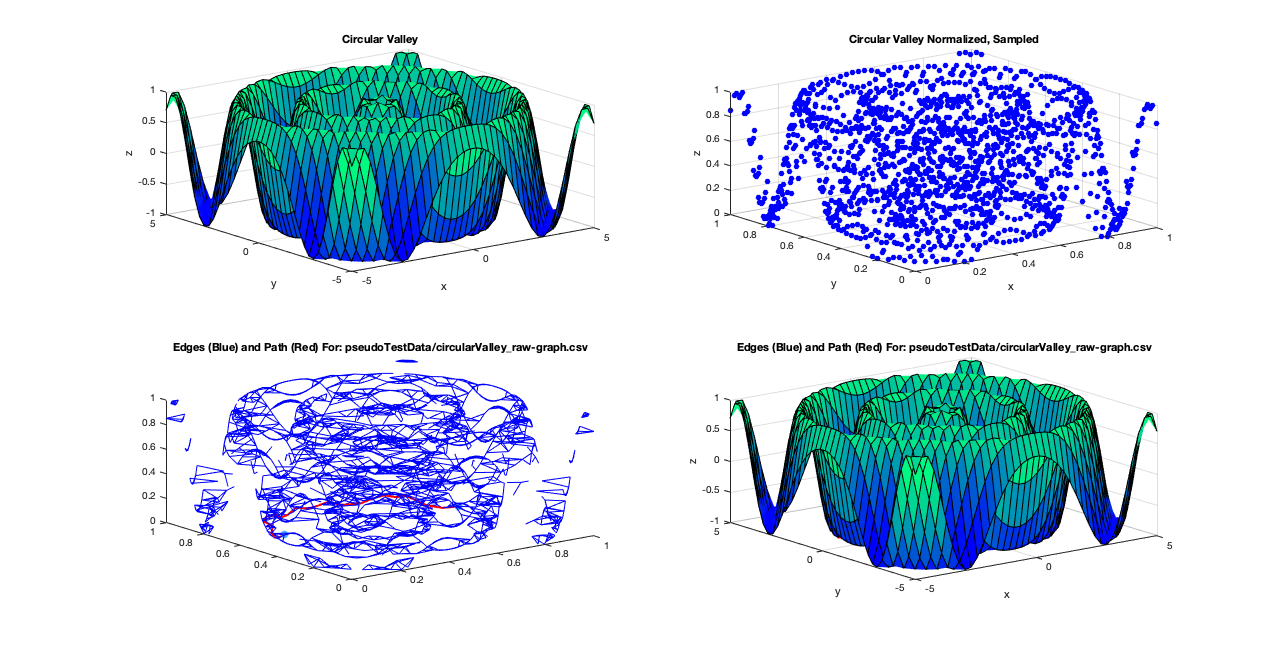
Circular Valley
Can pick endpoints on opposite sides of a circular valley.
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-5, 5, myN); myY = linspace(-5, 5, myN); [myXX, myYY] = meshgrid(myX, myY); myZZ = sin(3.*sqrt(myXX.^2+myYY.^2)); myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ); colormap winter; xlabel('x'); ylabel('y'); zlabel('z'); title('Circular Valley') % Plot "Sampled Data" myXVec = normalize(myXVec); myYVec = normalize(myYVec); myZVec = normalize(myZVec); subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 'bo', 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Circular Valley Normalized, Sampled') % All classified as ground myClasses = 2.*ones(length(myXVec), 1); % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClasses; csvwrite('circularValley_raw.csv', myLongRow); % Visualize Edge Connectivity myFilename = 'pseudoTestData/circularValley_raw-graph.csv'; myEdges = csvread(myFilename); subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ 0.1538 0.5641 0.04644; 0.8718 0.5641 0.02583]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/circularValley_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ); colormap winter hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Endpoints and Path Waypoints Need to be Un-Normalized! myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); myEndpoints(:, 1) = (myEndpoints(:, 1) * range(myXVec)) + min(myXVec); myEndpoints(:, 2) = (myEndpoints(:, 2) * range(myYVec)) + min(myYVec); myEndpoints(:, 3) = (myEndpoints(:, 3) * range(myZVec)) + min(myZVec); myPath(:, 1) = (myPath(:, 1) * range(myXVec)) + min(myXVec); myPath(:, 2) = (myPath(:, 2) * range(myYVec)) + min(myYVec); myPath(:, 3) = (myPath(:, 3) * range(myZVec)) + min(myZVec); % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
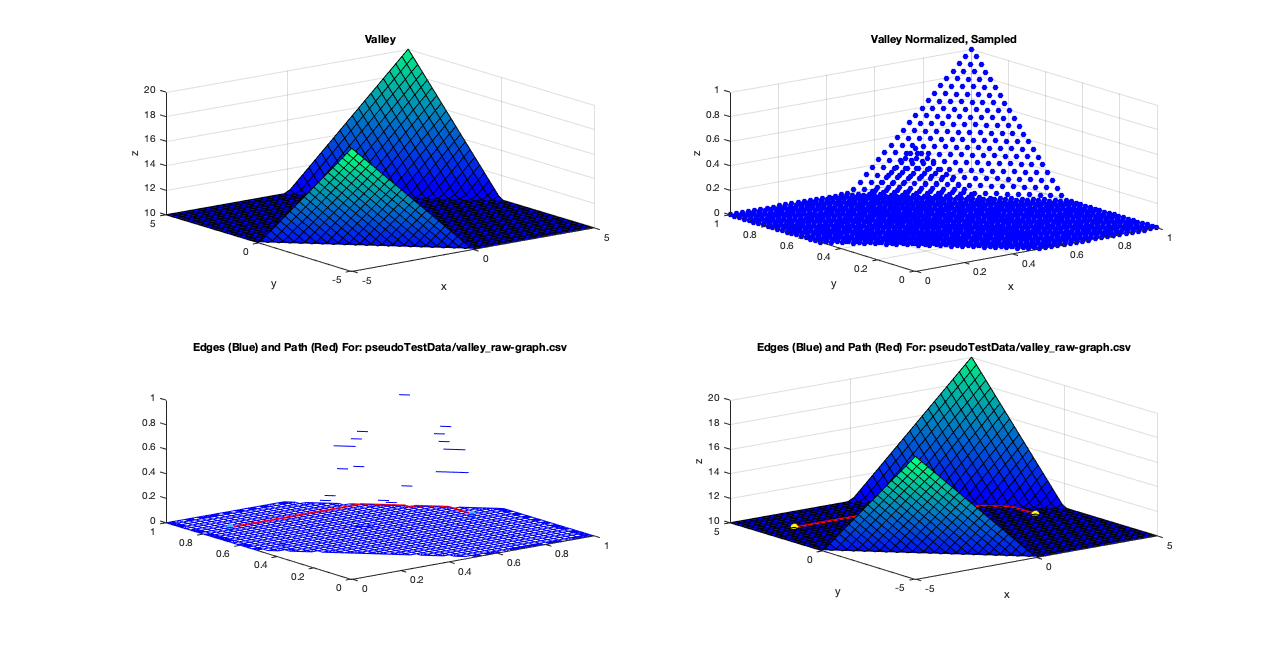
Valley
Can pick endpoints in the flat region - verify that the robot doesnt climb the hill.
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-5, 5, myN); myY = linspace(-5, 5, myN); [myXX, myYY] = meshgrid(myX, myY); myZZ = abs(myXX-2 + myYY-3) + abs(myXX+2 + myYY+3); myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ); colormap winter xlabel('x'); ylabel('y'); zlabel('z'); title('Valley') % Plot "Sampled Data" myXVec = normalize(myXVec); myYVec = normalize(myYVec); myZVec = normalize(myZVec); subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 'bo', 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Valley Normalized, Sampled') % All classified as ground myClasses = 2.*ones(length(myXVec), 1); % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClasses; csvwrite('valley_raw.csv', myLongRow); % Visualize Edge Connectivity myFilename = 'pseudoTestData/valley_raw-graph.csv'; myEdges = csvread(myFilename); subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ 0.1282 0.8205 0; 0.8718 0.4872 0]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/valley_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ); colormap winter hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Endpoints and Path Waypoints Need to be Un-Normalized! myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); myEndpoints(:, 1) = (myEndpoints(:, 1) * range(myXVec)) + min(myXVec); myEndpoints(:, 2) = (myEndpoints(:, 2) * range(myYVec)) + min(myYVec); myEndpoints(:, 3) = (myEndpoints(:, 3) * range(myZVec)) + min(myZVec); myPath(:, 1) = (myPath(:, 1) * range(myXVec)) + min(myXVec); myPath(:, 2) = (myPath(:, 2) * range(myYVec)) + min(myYVec); myPath(:, 3) = (myPath(:, 3) * range(myZVec)) + min(myZVec); % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
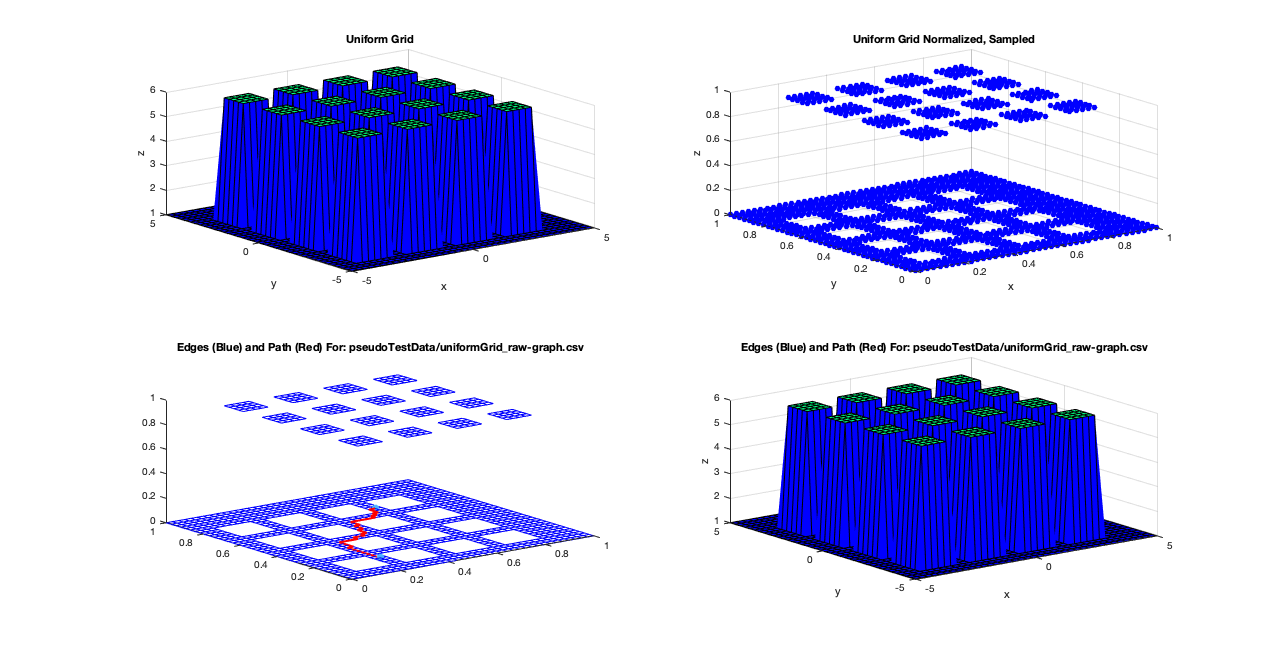
Uniform Grid
Can pick endpoints that are diagonally opposite. Snake through obstacles
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-5, 5, myN); myY = linspace(-5, 5, myN); [myXX, myYY] = meshgrid(myX, myY); myMask = zeros(size(myXX)); UniformDim = 4; for i = 1+UniformDim:2*UniformDim:myN-UniformDim for j = 1+UniformDim:2*UniformDim:myN-UniformDim myMask(i:i+UniformDim, j:j+UniformDim) = 1; end end myZZ = ones(size(myXX)) + 5.*ones(size(myXX)).*myMask; myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ); colormap winter xlabel('x'); ylabel('y'); zlabel('z'); title('Uniform Grid') % Plot "Sampled Data" myXVec = normalize(myXVec); myYVec = normalize(myYVec); myZVec = normalize(myZVec); subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 'bo', 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Uniform Grid Normalized, Sampled') % All classified as ground myClasses = 2.*ones(length(myXVec), 1); % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClasses; csvwrite('uniformGrid_raw.csv', myLongRow); % Visualize Edge Connectivity myFilename = 'pseudoTestData/uniformGrid_raw-graph.csv'; myEdges = csvread(myFilename); subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ 0.2564 0.1795 0; 0.6667 0.7436 0]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/uniformGrid_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ); colormap winter hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Endpoints and Path Waypoints Need to be Un-Normalized! myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); myEndpoints(:, 1) = (myEndpoints(:, 1) * range(myXVec)) + min(myXVec); myEndpoints(:, 2) = (myEndpoints(:, 2) * range(myYVec)) + min(myYVec); myEndpoints(:, 3) = (myEndpoints(:, 3) * range(myZVec)) + min(myZVec); myPath(:, 1) = (myPath(:, 1) * range(myXVec)) + min(myXVec); myPath(:, 2) = (myPath(:, 2) * range(myYVec)) + min(myYVec); myPath(:, 3) = (myPath(:, 3) * range(myZVec)) + min(myZVec); % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
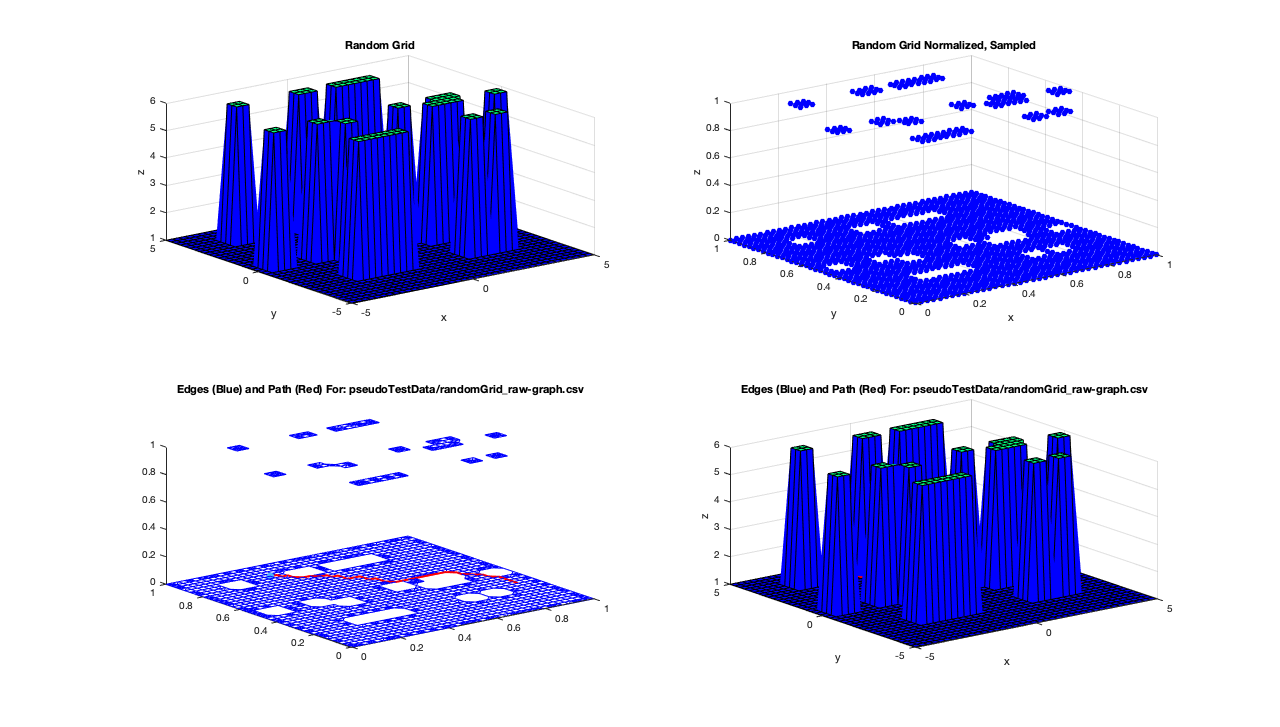
Random Grid
Can pick endpoints that are diagonally opposite. Snake through obstacles
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-5, 5, myN); myY = linspace(-5, 5, myN); [myXX, myYY] = meshgrid(myX, myY); myMask = zeros(size(myXX)); rng(22) % Seed for repeatability UniformDim = 2; for i = round((myN-UniformDim-(1+UniformDim))*rand(1, 4) + 1+UniformDim) for j = round((myN-UniformDim-(1+UniformDim))*rand(1, 6) + 1+UniformDim) myMask(i:i+UniformDim, j:j+UniformDim) = 1; end end myZZ = ones(size(myXX)) + 5.*ones(size(myXX)).*myMask; myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ); colormap winter xlabel('x'); ylabel('y'); zlabel('z'); title('Random Grid') % Plot "Sampled Data" myXVec = normalize(myXVec); myYVec = normalize(myYVec); myZVec = normalize(myZVec); subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 'bo', 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Random Grid Normalized, Sampled') % All classified as ground myClasses = 2.*ones(length(myXVec), 1); % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClasses; csvwrite('randomGrid_raw.csv', myLongRow); % Visualize Edge Connectivity myFilename = 'pseudoTestData/randomGrid_raw-graph.csv'; myEdges = csvread(myFilename); subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ 0.3333 0.8718 0 0.9231 0.3077 0]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/randomGrid_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ); colormap winter hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Endpoints and Path Waypoints Need to be Un-Normalized! myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); myEndpoints(:, 1) = (myEndpoints(:, 1) * range(myXVec)) + min(myXVec); myEndpoints(:, 2) = (myEndpoints(:, 2) * range(myYVec)) + min(myYVec); myEndpoints(:, 3) = (myEndpoints(:, 3) * range(myZVec)) + min(myZVec); myPath(:, 1) = (myPath(:, 1) * range(myXVec)) + min(myXVec); myPath(:, 2) = (myPath(:, 2) * range(myYVec)) + min(myYVec); myPath(:, 3) = (myPath(:, 3) * range(myZVec)) + min(myZVec); % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
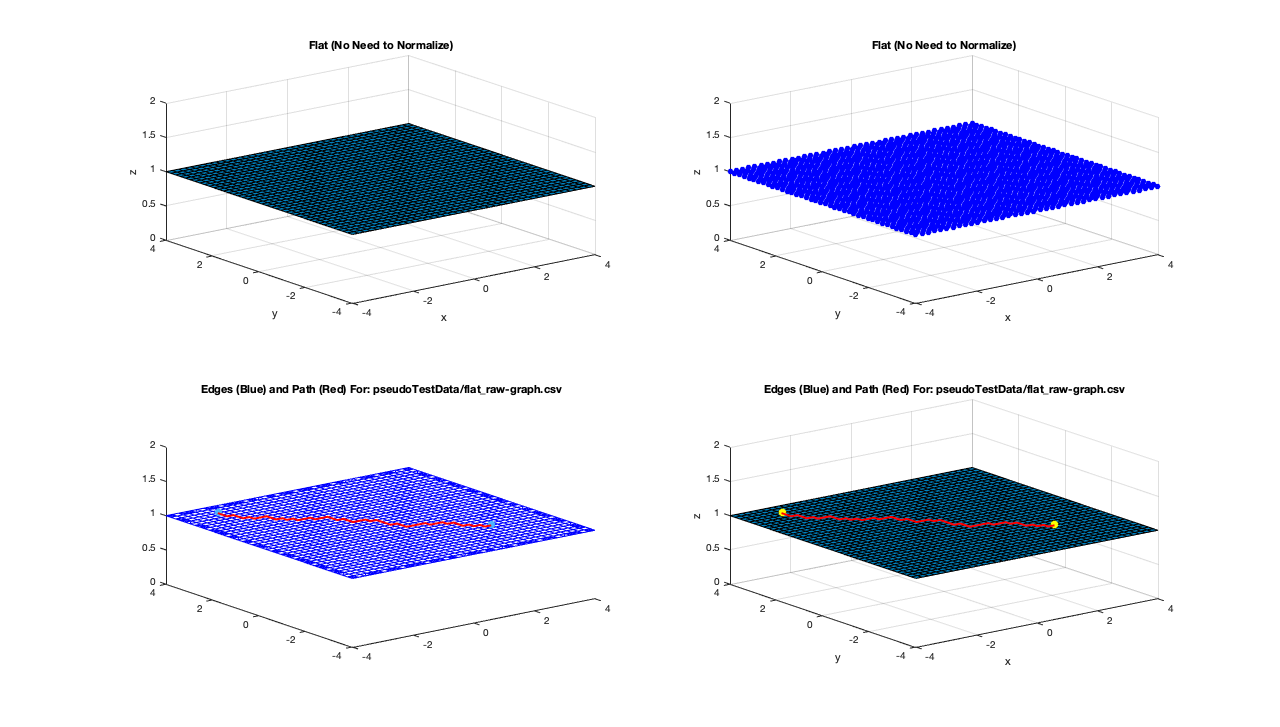
Flat
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-4, 4, myN); myY = linspace(-4, 4, myN); [myXX, myYY] = meshgrid(myX, myY); myZZ = ones(size(myXX)); myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ); colormap winter xlabel('x'); ylabel('y'); zlabel('z'); title('Flat (No Need to Normalize)') % Plot "Sampled Data" subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 'bo', 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Flat (No Need to Normalize)') % All classified as ground myClasses = 2.*ones(length(myXVec), 1); % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClasses; csvwrite('flat_raw.csv', myLongRow); myFilename = 'pseudoTestData/flat_raw-graph.csv'; myEdges = csvread(myFilename); % Visualize Edge Connectivity subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ -2.692 3.462 1; 2.179 -1.923 1]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/flat_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ); colormap winter hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
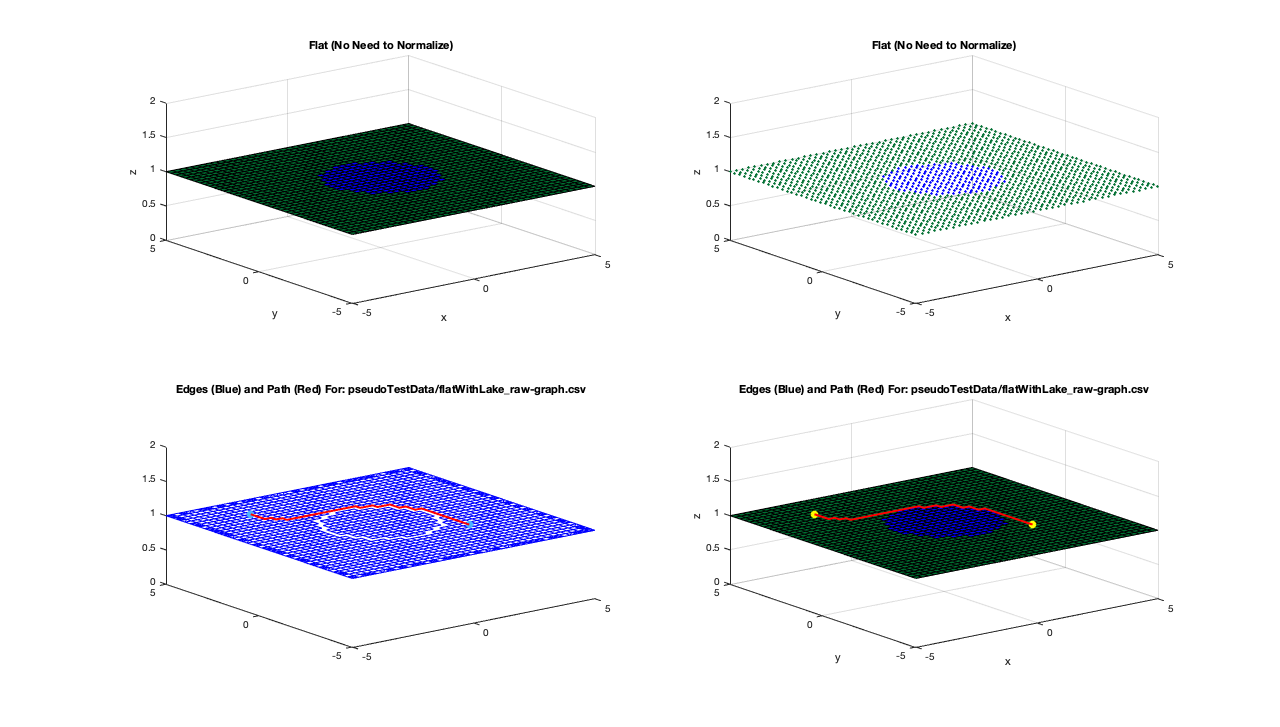
Flat With Lake
Can pick any two endpoints
close all; clear; clc % Form Dataset myN = 40; myX = linspace(-5, 5, myN); myY = linspace(-5, 5, myN); [myXX, myYY] = meshgrid(myX, myY); myZZ = ones(size(myXX)); myXVec = reshape(myXX, myN*myN, 1); myYVec = reshape(myYY, myN*myN, 1); myZVec = reshape(myZZ, myN*myN, 1); % Make a 'Pond' In the Middle % Ground is 2, Water is 9. myClasses = 7.*((myXX.^2 + myYY.^2) < 4); myClasses = myClasses + 2; myClassesVec = reshape(myClasses, myN*myN, 1); myColor = zeros(myN, myN, 3); myColor(:, :, 2) = (111/255).*(myClasses == 2); myColor(:, :, 3) = (myClasses == 9) + (49/255).*(myClasses == 2); % Surface Plot figure('units','normalized','outerposition',[0 0 1 1]) subplot(2, 2, 1) surf(myXX, myYY, myZZ, myColor); xlabel('x'); ylabel('y'); zlabel('z'); title('Flat (No Need to Normalize)') % Plot "Sampled Data" myColorVec = zeros(myN*myN, 3); myColorVec(:, 2) = (111/255).*(myClassesVec == 2); myColorVec(:, 3) = (myClassesVec == 9) + (49/255).*(myClassesVec == 2); subplot(2, 2, 2) scatter3(myXVec, myYVec, myZVec, 10, myColorVec, 'filled') xlabel('x'); ylabel('y'); zlabel('z'); title('Flat (No Need to Normalize)') % Write to a file myLongRow = zeros(1, 4*length(myXVec)); myLongRow(1:4:end) = myXVec; myLongRow(2:4:end) = myYVec; myLongRow(3:4:end) = myZVec; myLongRow(4:4:end) = myClassesVec; csvwrite('flatWithLake_raw.csv', myLongRow); % Visualize Edge Connectivity myFilename = 'pseudoTestData/flatWithLake_raw-graph.csv'; myEdges = csvread(myFilename); subplot(2, 2, 3) [r,c] = size(myEdges); for ii = 1:r plot3(myEdges(ii,1:2), myEdges(ii,3:4), myEdges(ii,5:6), 'b-') hold on end % Plot Start and End Points myEndpoints = [ -2.692 3.462 1; 2.179 -1.923 1]; scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[0.3 0.7 1],'MarkerFaceColor',[0.3 0.7 1],'LineWidth',1.5) % Overlay Path Generated by A* myFilename2 = 'pseudoTestData/flatWithLake_raw-path.csv'; myPath = csvread(myFilename2); [r,c] = size(myPath); plot3(myPath(:, 1), myPath(:,2), myPath(:,3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none') % Overlay Path on the Surface Plot subplot(2, 2, 4) surf(myXX, myYY, myZZ, myColor); hold on; xlabel('x'); ylabel('y'); zlabel('z'); title('Hill') % Plot Surface and Path scatter3(myEndpoints(:, 1), myEndpoints(:, 2), myEndpoints(:, 3), 40, ... 'MarkerEdgeColor',[1 1 0],'MarkerFaceColor',[1 1 0],'LineWidth',1.5) plot3(myPath(:, 1), myPath(:, 2), myPath(:, 3), 'r-', 'LineWidth', 2); title(['Edges (Blue) and Path (Red) For: ', myFilename], 'Interpreter', 'none')
Helper Function - Normalize
function myNormedVec = normalize(myVec) myNormedVec = myVec - min(myVec); myNormedVec = myNormedVec ./ max(myNormedVec); end
